Pelajaran ini dimulai dengan dua deskripsi matematis pengukuran yang setara:
Pengukuran umum bisa dijelaskan melalui kumpulan matriks, satu untuk setiap hasil pengukuran, dengan cara yang menggeneralisasi deskripsi pengukuran proyektif.
Pengukuran umum bisa dijelaskan sebagai channel yang outputnya selalu berupa keadaan klasik (direpresentasikan oleh matriks densitas diagonal).
Kita akan membatasi perhatian pada pengukuran yang memiliki finitely many kemungkinan hasil.
Walaupun mungkin untuk mendefinisikan pengukuran dengan hasil tak terhingga, hal itu jarang ditemukan dalam konteks komputasi dan pemrosesan informasi, dan juga memerlukan matematika tambahan (yaitu teori ukuran) untuk diformalkan dengan benar.
Fokus awal kita adalah pada pengukuran destruktif, di mana output pengukuran hanya berupa hasil pengukuran klasik saja — tanpa spesifikasi keadaan kuantum pasca-pengukuran dari sistem yang diukur.
Secara intuitif, kita bisa bayangkan bahwa pengukuran semacam ini menghancurkan sistem kuantum itu sendiri, atau sistem langsung dibuang setelah pengukuran dilakukan.
Nanti dalam pelajaran ini kita akan memperluas pandangan dan mempertimbangkan pengukuran non-destruktif, di mana ada hasil pengukuran klasik sekaligus keadaan kuantum pasca-pengukuran dari sistem yang diukur.
Misalkan X adalah sistem yang akan diukur, dan asumsikan untuk kesederhanaan bahwa himpunan keadaan klasik X adalah {0,…,n−1} untuk suatu bilangan bulat positif n, sehingga matriks densitas yang merepresentasikan keadaan kuantum X adalah matriks n×n.
Kita sebenarnya tidak terlalu perlu merujuk ke keadaan klasik X, tapi akan berguna untuk merujuk n, yaitu jumlah keadaan klasik X.
Kita juga akan mengasumsikan bahwa kemungkinan hasil pengukuran adalah bilangan bulat 0,…,m−1 untuk suatu bilangan bulat positif m.
Perhatikan bahwa kita hanya menggunakan nama-nama ini agar lebih sederhana;
mudah saja untuk menggeneralisasi semua yang berikut ke himpunan keadaan klasik dan hasil pengukuran terhingga lainnya, dengan mengganti namanya sesuai kebutuhan.
Ingat bahwa pengukuran proyektif dijelaskan oleh kumpulan matriks proyeksi yang berjumlah sama dengan matriks identitas.
Dalam simbol,
{Π0,…,Πm−1}
menjelaskan pengukuran proyektif dari X jika setiap Πa adalah matriks proyeksi n×n dan kondisi berikut terpenuhi.
Π0+⋯+Πm−1=IX
Ketika pengukuran semacam itu dilakukan pada sistem X saat berada dalam keadaan yang dijelaskan oleh vektor keadaan kuantum ∣ψ⟩, setiap hasil a diperoleh dengan probabilitas ∥Πa∣ψ⟩∥2.
Kita juga punya bahwa keadaan pasca-pengukuran X diperoleh dengan menormalisasi vektor Πa∣ψ⟩, tapi kita mengabaikan keadaan pasca-pengukuran untuk saat ini.
Jika keadaan X dijelaskan oleh matriks densitas ρ daripada vektor keadaan kuantum ∣ψ⟩, maka kita bisa mengekspresikan probabilitas memperoleh hasil a sebagai Tr(Πaρ).
Jika ρ=∣ψ⟩⟨ψ∣ adalah keadaan murni, maka kedua ekspresi itu setara:
Di sini kita menggunakan sifat siklik trace untuk persamaan kedua, dan untuk persamaan ketiga kita menggunakan fakta bahwa setiap Πa adalah matriks proyeksi, sehingga memenuhi Πa2=Πa.
Secara umum, jika ρ adalah kombinasi konveks
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
dari keadaan-keadaan murni, maka ekspresi Tr(Πaρ) bertepatan dengan probabilitas rata-rata untuk hasil a, berkat kenyataan bahwa ekspresi ini linier dalam ρ.
Deskripsi matematis untuk pengukuran umum diperoleh dengan melonggarkan definisi pengukuran proyektif.
Khususnya, kita mengizinkan matriks dalam kumpulan yang menjelaskan pengukuran menjadi matriks positif semidefinit yang sembarang, bukan hanya proyeksi.
(Proyeksi selalu positif semidefinit; mereka bisa juga didefinisikan sebagai matriks positif semidefinit yang nilai eigennya semua 0 atau 1.)
Secara khusus, pengukuran umum dari sistem X dengan hasil 0,…,m−1 ditentukan oleh kumpulan matriks positif semidefinit {P0,…,Pm−1} yang baris dan kolomnya bersesuaian dengan keadaan klasik X dan memenuhi kondisi
P0+⋯+Pm−1=IX.
Jika sistem X diukur saat berada dalam keadaan yang dijelaskan oleh matriks densitas ρ, maka setiap hasil
a∈{0,…,m−1} muncul dengan probabilitas Tr(Paρ).
Seperti yang harus kita tuntut secara alami, vektor probabilitas hasil
(Tr(P0ρ),…,Tr(Pm−1ρ))
dari pengukuran umum selalu membentuk vektor probabilitas, untuk pilihan matriks densitas ρ apapun.
Dua observasi berikut menetapkan bahwa ini memang terjadi.
Setiap nilai Tr(Paρ) haruslah tak negatif, berkat fakta bahwa trace dari perkalian dua matriks positif semidefinit apapun selalu tak negatif:
Q,R≥0⇒Tr(QR)≥0.
Salah satu cara untuk memargumenkan fakta ini adalah dengan menggunakan dekomposisi spektral dari Q dan R bersama sifat siklik trace untuk mengekspresikan trace dari perkalian QR sebagai jumlah bilangan real tak negatif, yang harus tak negatif.
Kondisi P0+⋯+Pm−1=IX bersama linearitas trace memastikan probabilitas berjumlah 1.
Misalkan X adalah sebuah qubit, dan definisikan dua matriks sebagai berikut.
P0=(32313131)P1=(31−31−3132)
Keduanya adalah matriks positif semidefinit: keduanya Hermitian, dan dalam kedua kasus nilai eigen kebetulan adalah 1/2±5/6, yang keduanya positif.
Kita juga punya P0+P1=I, dan oleh karena itu {P0,P1} menjelaskan sebuah pengukuran.
Jika keadaan X dijelaskan oleh matriks densitas ρ dan kita melakukan pengukuran ini, maka probabilitas memperoleh hasil 0 adalah Tr(P0ρ) dan probabilitas memperoleh hasil 1 adalah
Tr(P1ρ).
Misalnya, jika ρ=∣+⟩⟨+∣ maka probabilitas untuk dua hasil 0 dan 1 adalah sebagai berikut.
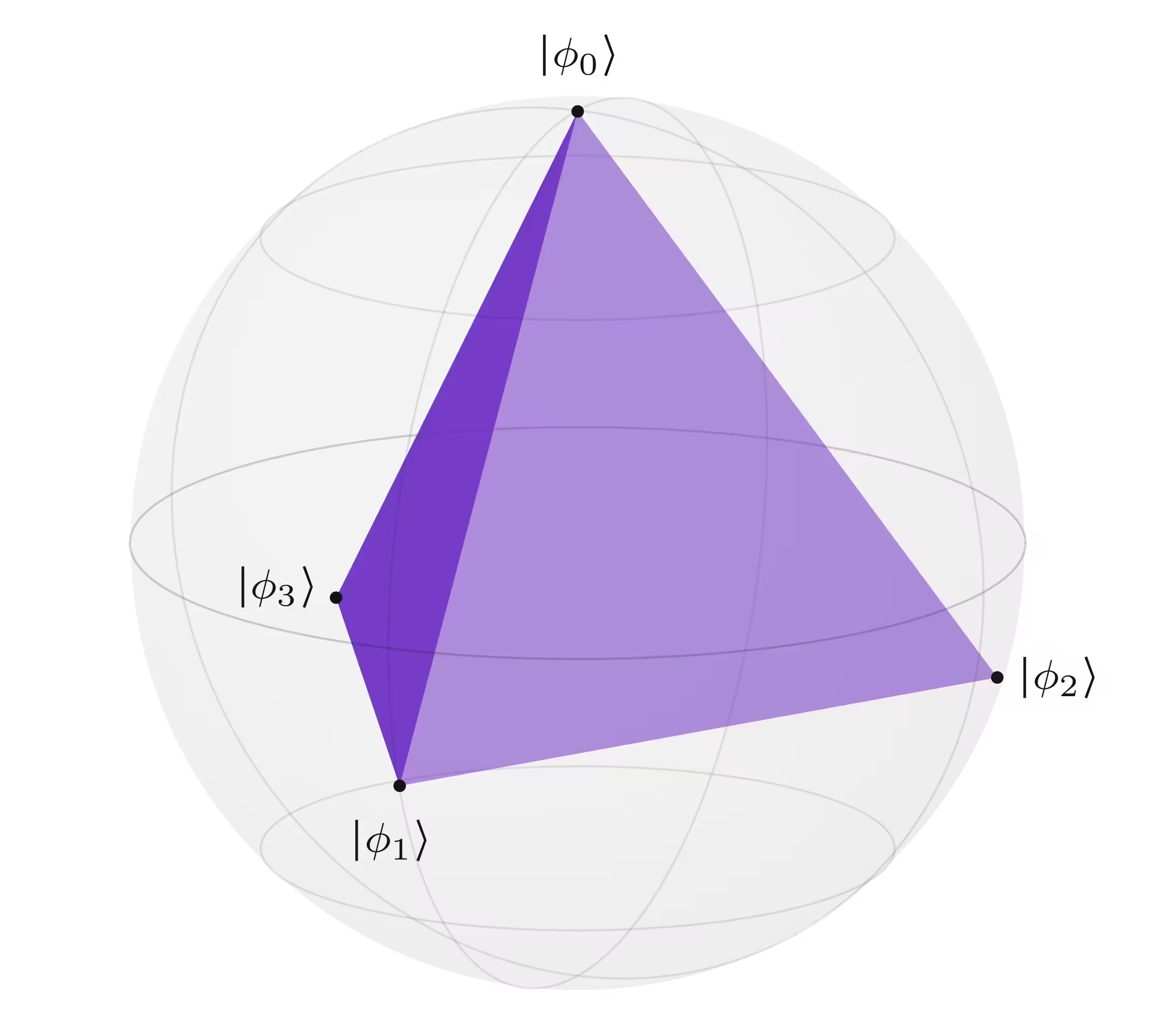
Keempat keadaan ini tersebar merata di bola Bloch, masing-masing berjarak sama dari tiga lainnya dan sudut antara dua keadaan manapun selalu sama.
Sekarang mari kita definisikan pengukuran {P0,P1,P2,P3} dari sebuah qubit dengan menetapkan Pa sebagai berikut untuk setiap a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
Kita dapat memverifikasi bahwa ini adalah pengukuran yang valid sebagai berikut.
Setiap Pa jelas positif semidefinit, karena merupakan keadaan murni yang dibagi dua.
Artinya, masing-masing adalah matriks Hermitian dan memiliki satu nilai eigen sama dengan 1/2 dan semua nilai eigen lainnya nol.
Jumlah matriks-matriks ini adalah matriks identitas: P0+P1+P2+P3=I.
Ekspresi matriks-matriks ini sebagai kombinasi linier dari matriks Pauli memudahkan verifikasi ini.
Cara kedua untuk mendeskripsikan pengukuran dalam istilah matematis adalah sebagai channel.
Informasi klasik bisa dipandang sebagai kasus khusus dari informasi kuantum, sejauh kita dapat mengidentifikasi keadaan probabilistik dengan matriks densitas diagonal.
Jadi, dalam istilah operasional, kita dapat memandang pengukuran sebagai channel yang inputnya adalah matriks yang mendeskripsikan keadaan sistem apapun yang diukur dan outputnya adalah matriks densitas diagonal yang mendeskripsikan distribusi hasil pengukuran yang dihasilkan.
Kita akan segera melihat bahwa setiap channel yang memiliki sifat ini selalu bisa ditulis dalam bentuk kanonik sederhana yang terhubung langsung dengan deskripsi pengukuran sebagai kumpulan matriks positif semidefinit.
Sebaliknya, untuk setiap pengukuran umum sebagai kumpulan matriks, selalu ada channel valid dengan sifat output diagonal yang mendeskripsikan pengukuran yang diberikan seperti yang disarankan di paragraf sebelumnya.
Dengan menggabungkan observasi-observasi ini, kita menemukan bahwa kedua deskripsi pengukuran umum itu setara.
Sebelum melanjutkan, mari kita lebih tepat tentang pengukuran, bagaimana kita memandangnya sebagai channel, dan asumsi apa yang kita buat.
Seperti sebelumnya, kita akan asumsikan bahwa X adalah sistem yang akan diukur, dan bahwa kemungkinan hasil pengukuran adalah bilangan bulat 0,…,m−1 untuk suatu bilangan bulat positif m.
Kita biarkan Y menjadi sistem yang menyimpan hasil pengukuran, sehingga himpunan keadaan klasiknya adalah {0,…,m−1}, dan kita merepresentasikan pengukuran sebagai channel bernama Φ dari X ke Y.
Asumsi kita adalah bahwa Y bersifat klasik — artinya tidak peduli keadaan awal X apapun, keadaan Y yang kita peroleh direpresentasikan oleh matriks densitas diagonal.
Kita dapat mengekspresikan dalam istilah matematis bahwa output Φ selalu diagonal dengan cara berikut.
Pertama definisikan channel completely dephasing Δm pada Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Channel ini analog dengan channel completely dephasing qubit Δ dari pelajaran sebelumnya.
Sebagai pemetaan linier, channel ini mengnolkan semua entri off-diagonal dari matriks input dan membiarkan diagonal tetap.
Dan sekarang, cara sederhana untuk mengekspresikan bahwa matriks densitas σ yang diberikan itu diagonal adalah melalui persamaan
σ=Δm(σ).
Dengan kata lain, mengnolkan semua entri off-diagonal dari matriks densitas tidak berpengaruh jika dan hanya jika entri off-diagonal memang sudah nol sejak awal.
Oleh karena itu channel Φ memenuhi asumsi kita — bahwa Y bersifat klasik — jika dan hanya jika
Φ(ρ)=Δm(Φ(ρ))
untuk setiap matriks densitas ρ yang merepresentasikan keadaan X.
Dengan demikian, untuk matriks-matriks P0,…,Pm−1 yang sama kita bisa mengekspresikan channel Φ sebagai berikut.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Ekspresi ini konsisten dengan deskripsi pengukuran umum kita dalam hal matriks, karena kita melihat setiap hasil pengukuran muncul dengan probabilitas Tr(Paρ).
Sekarang mari kita amati bahwa dua sifat yang diperlukan dari kumpulan matriks {P0,…,Pm−1} untuk mendeskripsikan pengukuran umum memang terpenuhi.
Sifat pertama adalah bahwa semuanya adalah matriks positif semidefinit.
Salah satu cara untuk melihat ini adalah dengan mengamati bahwa, untuk setiap vektor ∣ψ⟩ yang entri-entrinya bersesuaian dengan keadaan klasik X kita punya
Sekarang mari kita verifikasi bahwa untuk kumpulan {P0,…,Pm−1} matriks positif semidefinit manapun yang memenuhi P0+⋯+Pm−1=IX, pemetaan yang didefinisikan oleh
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
memang merupakan channel yang valid dari X ke Y.
Salah satu cara untuk melakukan ini adalah dengan menghitung representasi Choi dari pemetaan ini.
Transpose dari setiap Pa diperkenalkan untuk persamaan ketiga karena
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Ini memungkinkan ekspresi ∣b⟩⟨b∣ dan ∣c⟩⟨c∣ untuk muncul, yang menyederhanakan menjadi matriks identitas ketika dijumlahkan atas b dan c, masing-masing.
Berdasarkan asumsi bahwa P0,…,Pm−1 positif semidefinit, demikian pula P0T,…,Pm−1T.
Khususnya, mentranspose matriks Hermitian menghasilkan matriks Hermitian lainnya, dan nilai eigen dari matriks kuadrat apapun dan transposenya selalu sama.
Mengikuti hal ini, J(Φ) adalah positif semidefinit.
Menelusuri keluar sistem output Y (yang merupakan sistem di sebelah kanan) menghasilkan
TrY(J(Φ))=a=0∑m−1PaT=IXT=IX,
sehingga kita simpulkan bahwa Φ adalah sebuah channel.
Misalkan kita punya beberapa sistem yang secara kolektif berada dalam suatu keadaan kuantum, dan pengukuran umum dilakukan pada salah satu sistem tersebut.
Hasilnya adalah salah satu hasil pengukuran, dipilih secara acak sesuai dengan probabilitas yang ditentukan oleh pengukuran dan keadaan sistem sebelum pengukuran.
Keadaan yang dihasilkan dari sistem-sistem yang tersisa kemudian, pada umumnya, bergantung pada hasil pengukuran mana yang diperoleh.
Mari kita periksa bagaimana ini bekerja untuk sepasang sistem (X,Z) ketika sistem X diukur.
(Kita menamakan sistem di sebelah kanan Z karena kita akan mengambil Y sebagai sistem yang merepresentasikan keluaran klasik dari pengukuran ketika kita memandangnya sebagai channel.)
Kita kemudian bisa dengan mudah menggeneralisasi ke situasi di mana sistem-sistem tersebut dibalik urutannya maupun ke tiga sistem atau lebih.
Misalkan keadaan (X,Z) sebelum pengukuran dijelaskan oleh matriks densitas ρ, yang bisa kita tulis sebagai berikut.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
Dalam ekspresi ini kita mengasumsikan keadaan klasik dari X adalah 0,…,n−1.
Kita asumsikan bahwa pengukuran itu sendiri dijelaskan oleh kumpulan matriks
{P0,…,Pm−1}.
Pengukuran ini bisa secara alternatif dijelaskan sebagai channel Φ dari X ke Y, di mana Y adalah sistem baru yang memiliki himpunan keadaan klasik {0,…,m−1}.
Secara khusus, aksi channel ini bisa diekspresikan sebagai berikut.
Kita mempertimbangkan pengukuran sistem X, sehingga probabilitas diperolehnya berbagai hasil pengukuran hanya bergantung pada ρX, keadaan tereduksi dari X.
Secara khusus, probabilitas untuk setiap hasil a∈{0,…,m−1} yang muncul bisa diekspresikan dalam tiga cara yang ekuivalen.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
Ekspresi pertama secara alami merepresentasikan probabilitas untuk memperoleh hasil a berdasarkan apa yang sudah kita ketahui tentang pengukuran sistem tunggal.
Untuk mendapatkan ekspresi kedua kita cukup menggunakan definisi ρX=TrZ(ρ).
Untuk mendapatkan ekspresi ketiga memerlukan pemikiran lebih — dan para pelajar didorong untuk meyakinkan diri mereka sendiri bahwa hal itu benar.
Berikut petunjuknya: Ekuivalensi antara ekspresi kedua dan ketiga tidak bergantung pada ρ yang merupakan matriks densitas atau pada setiap Pa yang bersifat positif semidefinit. Coba tunjukkan pertama untuk hasil kali tensor berbentuk ρ=M⊗N dan kemudian simpulkan bahwa hal itu harus benar secara umum dengan linearitas.
Meskipun ekuivalensi antara ekspresi pertama dan ketiga dalam persamaan sebelumnya mungkin tidak langsung terlihat, hal itu masuk akal.
Dimulai dari pengukuran pada X, kita secara efektif mendefinisikan pengukuran dari (X,Z), di mana kita cukup membuang Z dan mengukur X.
Seperti semua pengukuran, pengukuran baru ini bisa dijelaskan oleh kumpulan matriks, dan tidak mengejutkan bahwa pengukuran ini dijelaskan oleh kumpulan
Jika kita ingin menentukan tidak hanya probabilitas untuk berbagai hasil tetapi juga keadaan yang dihasilkan dari Z terkondisi pada setiap hasil pengukuran, kita bisa melihat ke deskripsi channel dari pengukuran.
Secara khusus, mari kita periksa keadaan yang kita dapatkan ketika kita menerapkan Φ pada X dan tidak melakukan apa-apa pada Z.
Perhatikan bahwa ini adalah matriks densitas karena fakta bahwa Φ adalah channel, sehingga setiap matriks
TrX((Pa⊗IZ)ρ) pastilah positif semidefinit.
Satu langkah akhir mengubah ekspresi ini menjadi satu yang mengungkapkan apa yang kita cari.
seperti yang kita lihat dalam pelajaran Matriks densitas.
Untuk setiap hasil pengukuran a∈{0,…,m−1}, kita memiliki dengan probabilitas
p(a)=Tr((Pa⊗IZ)ρ)
bahwa Y berada dalam keadaan klasik ∣a⟩⟨a∣ dan Z berada dalam keadaan
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Artinya, ini adalah matriks densitas yang kita peroleh dengan menormalisasi
TrX((Pa⊗IZ)ρ)
dengan membaginya dengan tracenya.
(Secara formal, keadaan σa hanya terdefinisi ketika probabilitas p(a) tidak nol;
ketika p(a)=0 keadaan ini tidak relevan, karena mengacu pada peristiwa diskret yang terjadi dengan probabilitas nol.)
Secara alami, probabilitas hasil konsisten dengan pengamatan kita sebelumnya.
Ringkasnya, inilah yang terjadi ketika pengukuran {P0,…,Pm−1} dilakukan pada X ketika (X,Z) berada dalam keadaan ρ.
Setiap hasil a muncul dengan probabilitas p(a)=Tr((Pa⊗IZ)ρ).
Terkondisi pada diperolehnya hasil a, keadaan Z kemudian direpresentasikan oleh matriks densitas σa yang ditunjukkan dalam persamaan (2), yang diperoleh dengan menormalisasi TrX((Pa⊗IZ)ρ).
Kita bisa mengadaptasi deskripsi ini ke situasi lain, seperti ketika urutan sistem dibalik atau ketika ada tiga sistem atau lebih.
Secara konseptual ini mudah, meskipun bisa menjadi rumit untuk menuliskan rumus-rumusnya.
Secara umum, jika kita memiliki r sistem X1,…,Xr, keadaan sistem gabungan (X1,…,Xr) adalah ρ, dan pengukuran {P0,…,Pm−1} dilakukan pada Xk, hal berikut terjadi.
Setiap hasil a muncul dengan probabilitas
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Terkondisi pada diperolehnya hasil a, keadaan (X1,…,Xk−1,Xk+1,…,Xr) kemudian direpresentasikan oleh matriks densitas berikut.